Scheduling of a hybrid set of tasks
Introduction
In Scheduling of periodic tasks codelab , you learned how to schedule of set of periodic tasks using the Rate Mononotic Algorithm (RMA).
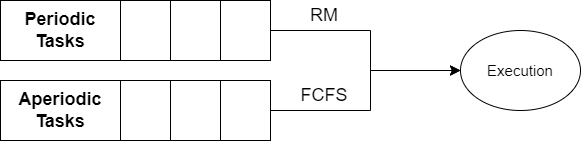
In this codelab, we address the problem of scheduling a hybrid set of tasks. A hybrid set of tasks is made of both periodic and aperiodic tasks. For this purpose, we first apply a simple Background Scheduling approach, where aperiodic tasks are scheduled in time slots and no periodic task is active. Given the limitation of this approach, we then implement servers for aperiodic tasks. We will first implement a Polling Server and second a Deferrable Server.
What you’ll build
In this codelab, you will build an application with a number of periodic and aperiodic tasks, using Background Scheduling, a Polling Server and a Deferrable Server. In all cases, periodic tasks will be scheduled using the Rate Monotic Algorithm.
What you’ll learn
- How to implement Background Scheduling.
- How to dimension a Server task.
- How to implement a Polling and a Deferrable server.
What you’ll need
- You need to have finished the Digging into Zephyr RTOS.
- You need to have completed the Scheduling of periodic tasks codelab
- You need to have completed the Robust Development Methodologies (I) codelab and the Robust Development Methodologies (II) codelab.
Project vs Codelabs
In the Scheduling of periodic tasks codelab, we used a set of periodic tasks described in an exercise. Starting from this codelab, we will use the set of periodic tasks described in the project specification, as well as the set of aperiodic tasks defined in the project specification.
To deliver the different phases of the project, you must use configuration parameters that correspond to features that must be implemented for each phase of the project, e.g. PERIODIC_TASKS or APERIODIC_TASKS. Add these parameters to the car_system/Kconfig file:
...
config PERIODIC_TASKS
bool "Build system with periodic tasks"
default n
help
This option must be enabled for adding periodic tasks to the CarSystem.
config APERIODIC_TASKS
bool "Build system with aperiodic tasks"
depends on PERIODIC_TASKS
default n
help
This option must be enabled for adding aperiodic tasks to the CarSystem.
This option cannot be enabled without PERIODIC_TASKS.
...
prj.conf file must define CONFIG_PERIODIC_TASKS=y. For phase B, both CONFIG_PERIODIC_TASKS=y and CONFIG_APERIODIC_TASKS=y must be set in the prj.conf file.
For each phase, you can choose to have multiple implementations of the CarSystem class with different namespaces and compiler options, or a single implementation with conditional compilation only. In any case, the program must compile and run correctly when the corresponding configuration options are selected.
Modify the Set of Periodic Tasks
The first step in this codelab is to modify the set of periodic tasks as described in the project specification. After making this change, verify that the modeled, simulated and measured task scheduling are identical.
If you try to validate statistically the measured task periods using the script provided in the Scheduling of periodic tasks codelab, you should observe that the period of the Rain task does not meet the period and computation time requirements:
============================================================
Marker 3 (0x00000003)
------------------------------------------------------------
Periods (Start to Start):
n=19 mean=249.421772ms min=239.044190ms max=260.101318ms std=6.984568ms
Durations (Start to Stop):
n=19 mean=37.385639ms min=35.247802ms max=45.379639ms std=4.120230ms
Questions
Observe your modeled, simulated and measured task scheduling. From these observations,
you should be able to explain why the period and computation time measurements are not as expected.
Running the statistical calculations with the adapted script below will provide additional information
about correctly interpreting of the measured periods and computation times. Note that this
script expects a tracing marker 0xFF at time 0, meaning at the time all threads have reached the barrier and
where processing can start.
Updated Python script for computing task statistics
#!/usr/bin/env python3
"""
sysview_csv_marker_parser.py (version 1.3)
=============================
Parse a SEGGER SystemView CSV export and validate that each task executes
exactly once within each period slot, measured from a TIME_ZERO marker.
Validation model:
A marker with ID 0xFF defines time zero. All subsequent analysis is
relative to that timestamp.
For each monitored marker (task), a period is specified on the command line.
Time is divided into slots of that period:
slot 0 : [0, period)
slot 1 : [period, 2*period)
slot 2 : [2*period, 3*period)
...
Within each slot, the script checks:
- The task marker fired exactly once (presence + no double execution)
- The execution time is within max_exec_us (if --max-exec-ms specified)
A marker interval that spans a slot boundary is counted in the slot
where it STARTED.
Preemption is detected from Task Run / Task Stop and ISR Enter / ISR Exit
events present in the same CSV — no additional instrumentation needed.
Expected CSV column layout (0-based):
0 : row index (numeric — used to identify data rows)
1 : time "0.000 000 000" (seconds)
2 : context ("Engine", "Rain", "ISR 37", "Idle", ...)
3 : event ("Start Marker 0x000000FF", "Task Run", "Task Stop",
"ISR Enter", "ISR Exit", ...)
4 : detail
TIME_ZERO marker:
Emit SEGGER_SYSVIEW_Mark(0xFF) at system start from your application.
All timestamps are shifted so that marker is t=0.
Usage:
python sysview_csv_marker_parser.py recording.csv --list-markers
python sysview_csv_marker_parser.py recording.csv \\
--marker 0x00 --task Engine --period-ms 10.0 --max-exec-ms 3.0 \\
--marker 0x01 --task Rain --period-ms 20.0 --max-exec-ms 5.0 \\
--tolerance-period-start-ms 0.2
python sysview_csv_marker_parser.py recording.csv \\
--marker 0x00 --task Engine --period-ms 10.0 \\
--output-csv results.csv
"""
import argparse
import csv
import os
import re
import sys
from dataclasses import dataclass, field
from typing import Dict, List, Optional, Tuple
# ── Constants ─────────────────────────────────────────────────────────────────
TIME_ZERO_MARKER_ID = 0xFF
COL_TIME = 1
COL_CONTEXT = 2
COL_EVENT = 3
COL_DETAIL = 4
MIN_COLUMNS = 4
# ── Event classification ──────────────────────────────────────────────────────
RE_START_MARKER = re.compile(r"^Start\s+Marker\s+0x([0-9a-fA-F]+)", re.IGNORECASE)
RE_STOP_MARKER = re.compile(r"^Stop\s+Marker\s+0x([0-9a-fA-F]+)", re.IGNORECASE)
RE_MARK_MARKER = re.compile(r"^Mark\s+Marker\s+0x([0-9a-fA-F]+)", re.IGNORECASE)
def classify_event(event_str: str) -> str:
s = event_str.strip()
sl = s.lower()
if RE_START_MARKER.match(s): return 'marker_start'
if RE_STOP_MARKER.match(s): return 'marker_stop'
if RE_MARK_MARKER.match(s): return 'mark_marker'
if sl == 'task run': return 'task_run'
if sl == 'task stop': return 'task_stop'
if sl == 'isr enter': return 'isr_enter'
if sl == 'isr exit': return 'isr_exit'
return 'unknown'
def parse_time_us(time_str: str) -> float:
"""Parse '0.000 183 105' -> microseconds."""
return float(time_str.replace(" ", "")) * 1_000_000.0
# ── Raw event ─────────────────────────────────────────────────────────────────
@dataclass
class RawEvent:
row: int
time_us: float
context: str
kind: str
event_str: str
detail: str
marker_id: Optional[int] = None
# ── Exec / ISR windows ────────────────────────────────────────────────────────
@dataclass
class ExecWindow:
task: str
start_us: float
stop_us: float
@property
def duration_us(self) -> float:
return self.stop_us - self.start_us
@dataclass
class IsrWindow:
isr_name: str
start_us: float
stop_us: float
@property
def duration_us(self) -> float:
return self.stop_us - self.start_us
# ── Marker interval ───────────────────────────────────────────────────────────
@dataclass
class MarkerInterval:
"""One start->stop interval for a given marker, relative to TIME_ZERO."""
marker_id: int
task_name: str
start_us: float # relative to TIME_ZERO
stop_us: float # relative to TIME_ZERO
# Filled by correlation with task/ISR events
exec_us: float = 0.0
elapsed_us: float = 0.0
preemption_us: float = 0.0
isr_us: float = 0.0
other_task_us: float = 0.0
exec_windows: List[ExecWindow] = field(default_factory=list)
other_exec_windows: List[ExecWindow] = field(default_factory=list)
isr_windows: List[IsrWindow] = field(default_factory=list)
@property
def preemption_pct(self) -> float:
return (self.preemption_us / self.elapsed_us * 100.0
if self.elapsed_us > 0 else 0.0)
# ── Slot validation result ────────────────────────────────────────────────────
@dataclass
class SlotResult:
"""Validation result for one period slot."""
slot_index: int
slot_start_us: float
slot_end_us: float
intervals: List[MarkerInterval] = field(default_factory=list)
@property
def count(self) -> int:
return len(self.intervals)
@property
def fired_once(self) -> bool:
return self.count == 1
@property
def missing(self) -> bool:
return self.count == 0
@property
def double_fired(self) -> bool:
return self.count > 1
def max_exec_violation(self, limit_us: float) -> bool:
if limit_us <= 0:
return False
return any(iv.exec_us > limit_us for iv in self.intervals)
def boundary_crossed(self) -> bool:
"""True if any interval's stop_us falls beyond this slot's end."""
return any(iv.stop_us > self.slot_end_us for iv in self.intervals)
def boundary_overshoot_us(self) -> float:
"""Maximum overshoot past the slot end across all intervals."""
if not self.intervals:
return 0.0
return max(max(iv.stop_us - self.slot_end_us, 0.0)
for iv in self.intervals)
def passes(self, limit_us: float = 0.0) -> bool:
return (self.fired_once
and not self.max_exec_violation(limit_us)
and not self.boundary_crossed())
# ── Statistics ────────────────────────────────────────────────────────────────
@dataclass
class Stats:
n: int = 0
mean_us: float = 0.0
min_us: float = float('inf')
max_us: float = 0.0
std_us: float = 0.0
@staticmethod
def compute(values: List[float]) -> 'Stats':
if not values:
return Stats()
n = len(values)
mean = sum(values) / n
variance = sum((v - mean) ** 2 for v in values) / n
return Stats(n=n, mean_us=mean, min_us=min(values), max_us=max(values),
std_us=variance ** 0.5)
def print(self, label: str) -> None:
if self.n == 0:
print(f" {label}: no data")
return
print(f" {label}:")
print(f" n={self.n} "
f"mean={self.mean_us/1000:.6f}ms "
f"min={self.min_us/1000:.6f}ms "
f"max={self.max_us/1000:.6f}ms "
f"std={self.std_us/1000:.6f}ms")
# ── CSV parser ────────────────────────────────────────────────────────────────
def parse_csv(filepath: str,
verbose: bool = False) -> Tuple[List[RawEvent], List[str]]:
events: List[RawEvent] = []
warnings: List[str] = []
with open(filepath, newline='', encoding='utf-8-sig') as f:
reader = csv.reader(f)
row_num = 0
for raw_row in reader:
row_num += 1
row = [c.strip().strip('"') for c in raw_row]
if len(row) < MIN_COLUMNS:
continue
try:
int(row[0])
except ValueError:
continue # header or metadata line
try:
time_us = parse_time_us(row[COL_TIME])
except (ValueError, IndexError):
warnings.append(
f"Row {row_num}: cannot parse time '{row[COL_TIME]}'")
continue
context = row[COL_CONTEXT]
event_str = row[COL_EVENT]
detail = row[COL_DETAIL] if len(row) > COL_DETAIL else ""
kind = classify_event(event_str)
marker_id = None
if kind == 'marker_start':
m = RE_START_MARKER.match(event_str)
if m: marker_id = int(m.group(1), 16)
elif kind == 'marker_stop':
m = RE_STOP_MARKER.match(event_str)
if m: marker_id = int(m.group(1), 16)
elif kind == 'mark_marker':
m = RE_MARK_MARKER.match(event_str)
if m: marker_id = int(m.group(1), 16)
events.append(RawEvent(
row=int(row[0]), time_us=time_us, context=context,
kind=kind, event_str=event_str, detail=detail,
marker_id=marker_id,
))
if verbose and kind != 'unknown':
print(f" [{int(row[0]):5d}] {time_us:14.3f}us "
f"{kind:15s} ctx={context:20s} "
f"mid={marker_id if marker_id is not None else '-':>5} "
f"{detail[:40]}")
return events, warnings
# ── Find TIME_ZERO ────────────────────────────────────────────────────────────
def find_time_zero(events: List[RawEvent]) -> Optional[float]:
"""
Find the first Start Marker with ID 0xFF and return its timestamp.
Returns None if not found.
"""
for evt in events:
if evt.kind == 'mark_marker' and evt.marker_id == TIME_ZERO_MARKER_ID:
return evt.time_us
return None
# ── Build exec / ISR windows ──────────────────────────────────────────────────
def build_exec_windows(events: List[RawEvent]) -> List[ExecWindow]:
"""
Build ExecWindow list from Task Run / Task Stop pairs.
Task Run -> context = task that starts running
Task Stop -> closes the current running task window
"""
windows: List[ExecWindow] = []
current_task: Optional[str] = None
current_start: float = 0.0
for evt in events:
if evt.kind == 'task_run':
if current_task is not None:
windows.append(
ExecWindow(current_task, current_start, evt.time_us))
current_task = evt.context
current_start = evt.time_us
elif evt.kind == 'task_stop':
if current_task is not None:
windows.append(
ExecWindow(current_task, current_start, evt.time_us))
current_task = None
return windows
def build_isr_windows(events: List[RawEvent]) -> List[IsrWindow]:
windows: List[IsrWindow] = []
pending: Dict[str, float] = {}
for evt in events:
if evt.kind == 'isr_enter':
pending[evt.context] = evt.time_us
elif evt.kind == 'isr_exit':
if evt.context in pending:
windows.append(
IsrWindow(evt.context, pending.pop(evt.context), evt.time_us))
return windows
# ── Build marker intervals ────────────────────────────────────────────────────
def build_marker_intervals(events: List[RawEvent],
exec_windows: List[ExecWindow],
isr_windows: List[IsrWindow],
time_zero_us: float
) -> Dict[int, List[MarkerInterval]]:
"""
Build MarkerInterval list per marker ID (excluding 0xFF TIME_ZERO marker).
All timestamps stored relative to time_zero_us.
Correlates exec and ISR windows for preemption breakdown.
"""
pending_start: Dict[int, RawEvent] = {}
result: Dict[int, List[MarkerInterval]] = {}
for evt in events:
if evt.kind == 'marker_start' and evt.marker_id is not None:
pending_start[evt.marker_id] = evt
elif evt.kind == 'marker_stop' and evt.marker_id is not None:
mid = evt.marker_id
if mid not in pending_start:
continue
start_evt = pending_start.pop(mid)
iv = MarkerInterval(
marker_id = mid,
task_name = start_evt.context,
start_us = start_evt.time_us - time_zero_us,
stop_us = evt.time_us - time_zero_us,
)
# Correlate: use absolute times for window overlap check
ws = start_evt.time_us
we = evt.time_us
own_exec_us = 0.0
other_task_us = 0.0
isr_total_us = 0.0
iv_exec: List[ExecWindow] = []
iv_other: List[ExecWindow] = []
iv_isr: List[IsrWindow] = []
for ew in exec_windows:
ol_start = max(ew.start_us, ws)
ol_stop = min(ew.stop_us, we)
if ol_stop <= ol_start:
continue
ol_us = ol_stop - ol_start
# Store relative timestamps in the window
rel_start = ol_start - time_zero_us
rel_stop = ol_stop - time_zero_us
if ew.task == iv.task_name:
own_exec_us += ol_us
iv_exec.append(ExecWindow(ew.task, rel_start, rel_stop))
else:
other_task_us += ol_us
iv_other.append(ExecWindow(ew.task, rel_start, rel_stop))
for iw in isr_windows:
ol_start = max(iw.start_us, ws)
ol_stop = min(iw.stop_us, we)
if ol_stop <= ol_start:
continue
ol_us = ol_stop - ol_start
isr_total_us += ol_us
iv_isr.append(IsrWindow(iw.isr_name,
ol_start - time_zero_us,
ol_stop - time_zero_us))
# Fallback: if no task exec events recorded, elapsed = exec
if not exec_windows:
own_exec_us = iv.stop_us - iv.start_us
iv.exec_us = own_exec_us
iv.elapsed_us = iv.stop_us - iv.start_us
iv.isr_us = isr_total_us
iv.other_task_us = other_task_us
iv.preemption_us = max(0.0, iv.elapsed_us - own_exec_us)
iv.exec_windows = iv_exec
iv.other_exec_windows = iv_other
iv.isr_windows = iv_isr
result.setdefault(mid, []).append(iv)
return result
# ── Slot assignment ───────────────────────────────────────────────────────────
def assign_slots(intervals: List[MarkerInterval],
period_us: float,
tolerance_period_start_us: float,
num_slots: int) -> List[SlotResult]:
"""
Assign each interval to the slot where its start_us falls.
Slot N covers [N*period_us, (N+1)*period_us).
An interval spanning a boundary is counted in the slot where it started
if it started before the slot start minus tolerance
Intervals with start_us < 0 (before TIME_ZERO) are ignored.
"""
slots = [
SlotResult(
slot_index = n,
slot_start_us = n * period_us,
slot_end_us = (n + 1) * period_us,
)
for n in range(num_slots)
]
for iv in intervals:
if iv.start_us < 0:
continue # before TIME_ZERO
slot_index = int((iv.start_us + tolerance_period_start_us)/ period_us)
if 0 <= slot_index < num_slots:
slots[slot_index].intervals.append(iv)
return slots
# ── Constraint ────────────────────────────────────────────────────────────────
@dataclass
class MarkerConstraint:
marker_id: int
task_name: Optional[str] = None
period_ms: Optional[float] = None
max_exec_ms: Optional[float] = None
# ── Analysis ──────────────────────────────────────────────────────────────────
def analyse_marker(mid: int,
intervals: List[MarkerInterval],
constraint: Optional[MarkerConstraint],
total_us: float,
tolerance_period_start_us: float,
verbose: bool = False) -> bool:
print(f"{'=' * 68}")
print(f"Marker {mid:#04x} ({mid})")
task_names = sorted(set(iv.task_name for iv in intervals))
print(f"Task : {', '.join(task_names)}")
if not constraint or not constraint.period_ms:
print("NOTE : No period specified — reporting statistics only")
_print_stats_only(intervals)
return True
period_us = constraint.period_ms * 1000.0
limit_exec_us = (constraint.max_exec_ms * 1000.0
if constraint.max_exec_ms else 0.0)
print(f"Period : {constraint.period_ms}ms")
if limit_exec_us > 0:
print(f"Max exec : {constraint.max_exec_ms}ms")
num_slots = max(1, int(total_us / period_us))
print(f"Slots : {num_slots} "
f"(recording covers {total_us/1000:.3f}ms after TIME_ZERO)")
print(f"{'─' * 68}")
slots = assign_slots(intervals, period_us, tolerance_period_start_us, num_slots)
boundary_slots = [s for s in slots if s.boundary_crossed()]
# Slots whose MISSING or DOUBLE FIRE is explained by an adjacent
# boundary crossing are suppressed — the boundary violation is the
# root cause; cascading count anomalies are noise.
boundary_indices = {s.slot_index for s in boundary_slots}
explained_indices = set()
for bi in boundary_indices:
explained_indices.add(bi + 1) # next slot gets an extra interval
explained_indices.add(bi - 1) # prev slot may be missing one
missing_slots = [s for s in slots
if s.missing
and s.slot_index not in explained_indices]
double_fire_slots = [s for s in slots
if s.double_fired
and s.slot_index not in explained_indices
and s.slot_index not in boundary_indices]
exec_viol_slots = [s for s in slots
if s.max_exec_violation(limit_exec_us)]
pass_slots = [s for s in slots if s.passes(limit_exec_us)]
all_pass = (len(missing_slots) == 0 and
len(double_fire_slots) == 0 and
len(exec_viol_slots) == 0 and
len(boundary_slots) == 0)
# ── Execution time statistics ─────────────────────────────────────────────
task_label = (task_names[0] if len(task_names) == 1
else ', '.join(task_names))
exec_values = [iv.exec_us for iv in intervals]
elapsed_values = [iv.elapsed_us for iv in intervals]
preempt_values = [iv.preemption_us for iv in intervals]
isr_values = [iv.isr_us for iv in intervals]
other_values = [iv.other_task_us for iv in intervals]
Stats.compute(exec_values).print(
f"Execution time ({task_label}, excl. preemption)")
Stats.compute(elapsed_values).print(
f"Elapsed time ({task_label}, incl. preemption)")
Stats.compute(preempt_values).print(
"Preemption (elapsed - execution)")
if any(v > 0 for v in isr_values):
Stats.compute(isr_values).print("ISR time")
isr_by_name: Dict[str, List[float]] = {}
for iv in intervals:
for iw in iv.isr_windows:
isr_by_name.setdefault(iw.isr_name, []).append(iw.duration_us)
for name, durations in sorted(isr_by_name.items()):
s = Stats.compute(durations)
print(f" {name}: n={s.n} mean={s.mean_us/1000:.6f}ms "
f"max={s.max_us/1000:.6f}ms")
if any(v > 0 for v in other_values):
Stats.compute(other_values).print(
f"Other tasks (preempted {task_label})")
other_by_name: Dict[str, List[float]] = {}
for iv in intervals:
for ew in iv.other_exec_windows:
other_by_name.setdefault(ew.task, []).append(ew.duration_us)
for name, durations in sorted(other_by_name.items()):
s = Stats.compute(durations)
print(f" {name}: n={s.n} mean={s.mean_us/1000:.6f}ms "
f"max={s.max_us/1000:.6f}ms")
if preempt_values:
mean_pct = sum(iv.preemption_pct for iv in intervals) / len(intervals)
max_pct = max(iv.preemption_pct for iv in intervals)
print(f" Preemption % : mean={mean_pct:.1f}% max={max_pct:.1f}%")
# ── Slot summary ──────────────────────────────────────────────────────────
print(f"\n Slot summary ({num_slots} slots x {constraint.period_ms}ms):")
print(f" PASS : {len(pass_slots)}/{num_slots}")
if boundary_slots:
print(f" BOUNDARY : {len(boundary_slots)} slot(s) crossed boundary")
if missing_slots:
indices = [str(s.slot_index) for s in missing_slots]
print(f" MISSING : slots {', '.join(indices)}")
if double_fire_slots:
indices = [str(s.slot_index) for s in double_fire_slots]
print(f" DOUBLE FIRE : slots {', '.join(indices)}")
for s in double_fire_slots:
for iv in s.intervals:
print(f" slot {s.slot_index}: "
f"start={iv.start_us/1000:.4f}ms "
f"exec={iv.exec_us/1000:.4f}ms")
if exec_viol_slots:
indices = [str(s.slot_index) for s in exec_viol_slots]
print(f" EXEC OVERSHOOT: slots {', '.join(indices)} "
f"(limit={constraint.max_exec_ms}ms)")
for s in exec_viol_slots:
for iv in s.intervals:
if iv.exec_us <= limit_exec_us:
continue
overshoot_us = iv.exec_us - limit_exec_us
print(f" slot {s.slot_index}:")
print(f" start = {iv.start_us/1000:.4f}ms "
f"stop = {iv.stop_us/1000:.4f}ms")
print(f" exec = {iv.exec_us/1000:.4f}ms "
f"limit = {constraint.max_exec_ms}ms "
f"overshoot = +{overshoot_us/1000:.4f}ms")
print(f" elapsed = {iv.elapsed_us/1000:.4f}ms "
f"preemption = {iv.preemption_us/1000:.4f}ms "
f"({iv.preemption_pct:.1f}%)")
# ISR breakdown within this interval
if iv.isr_windows:
isr_by_name: Dict[str, float] = {}
for iw in iv.isr_windows:
isr_by_name[iw.isr_name] = (
isr_by_name.get(iw.isr_name, 0.0) + iw.duration_us)
isr_parts = " ".join(
f"{name}={us/1000:.4f}ms"
for name, us in sorted(isr_by_name.items()))
print(f" isr = {iv.isr_us/1000:.4f}ms "
f"({isr_parts})")
# Other task breakdown within this interval
if iv.other_exec_windows:
other_by_name: Dict[str, float] = {}
for ew in iv.other_exec_windows:
other_by_name[ew.task] = (
other_by_name.get(ew.task, 0.0) + ew.duration_us)
other_parts = " ".join(
f"{name}={us/1000:.4f}ms"
for name, us in sorted(other_by_name.items()))
print(f" other tasks= {iv.other_task_us/1000:.4f}ms "
f"({other_parts})")
if boundary_slots:
indices = [str(s.slot_index) for s in boundary_slots]
print(f" BOUNDARY CROSSED: slots {', '.join(indices)} "
f"(task executed past slot end)")
for s in boundary_slots:
for iv in s.intervals:
overshoot_us = iv.stop_us - s.slot_end_us
if overshoot_us <= 0:
continue
print(f" slot {s.slot_index}:")
print(f" start = {iv.start_us/1000:.4f}ms "
f"stop = {iv.stop_us/1000:.4f}ms "
f"slot end = {s.slot_end_us/1000:.4f}ms")
print(f" overshoot = +{overshoot_us/1000:.4f}ms "
f"past slot boundary")
print(f" exec = {iv.exec_us/1000:.4f}ms "
f"elapsed = {iv.elapsed_us/1000:.4f}ms "
f"preemption = {iv.preemption_us/1000:.4f}ms "
f"({iv.preemption_pct:.1f}%)")
# ISR breakdown
if iv.isr_windows:
isr_by_name_b: Dict[str, float] = {}
for iw in iv.isr_windows:
isr_by_name_b[iw.isr_name] = (
isr_by_name_b.get(iw.isr_name, 0.0) + iw.duration_us)
isr_parts = ' '.join(
f'{name}={us/1000:.4f}ms'
for name, us in sorted(isr_by_name_b.items()))
print(f" isr = {iv.isr_us/1000:.4f}ms "
f"({isr_parts})")
# Other task breakdown
if iv.other_exec_windows:
other_by_name_b: Dict[str, float] = {}
for ew in iv.other_exec_windows:
other_by_name_b[ew.task] = (
other_by_name_b.get(ew.task, 0.0) + ew.duration_us)
other_parts = ' '.join(
f'{name}={us/1000:.4f}ms'
for name, us in sorted(other_by_name_b.items()))
print(f" other tasks= {iv.other_task_us/1000:.4f}ms "
f"({other_parts})")
# ── Verbose per-slot table ────────────────────────────────────────────────
if verbose:
print()
hdr = (f" {'Slot':>5} {'Slot start':>11} {'Slot end':>11} "
f"{'iv start':>10} {'exec_ms':>10} "
f"{'elapsed_ms':>11} {'preempt_ms':>11} {'Result':>12}")
print(hdr)
print(" " + "─" * (len(hdr) - 2))
for s in slots:
slot_s = f"{s.slot_start_us/1000:>11.4f}"
slot_e = f"{s.slot_end_us/1000:>11.4f}"
if s.intervals:
for idx, iv in enumerate(s.intervals):
if s.passes(limit_exec_us):
tag = 'PASS'
elif s.boundary_crossed() and not s.max_exec_violation(limit_exec_us):
tag = 'FAIL BOUNDARY'
elif s.boundary_crossed() and s.max_exec_violation(limit_exec_us):
tag = 'FAIL EXEC+BNDRY'
else:
tag = 'FAIL'
if s.double_fired and idx > 0:
tag = 'FAIL +DUPE'
print(f" {s.slot_index:>5} {slot_s} {slot_e} "
f"{iv.start_us/1000:>10.4f} "
f"{iv.exec_us/1000:>10.6f} "
f"{iv.elapsed_us/1000:>11.6f} "
f"{iv.preemption_us/1000:>11.6f} "
f"{tag:>12}")
else:
print(f" {s.slot_index:>5} {slot_s} {slot_e} "
f"{'─':>10} {'─':>10} {'─':>11} {'─':>11} "
f"{'MISSING':>12}")
print()
print(f"\n {'PASS' if all_pass else 'FAIL'} Marker {mid:#04x} "
f"({len(pass_slots)}/{num_slots} slots passed)")
print()
return all_pass
def _print_stats_only(intervals: List[MarkerInterval]) -> None:
exec_values = [iv.exec_us for iv in intervals]
elapsed_values = [iv.elapsed_us for iv in intervals]
Stats.compute(exec_values).print("Execution time (excl. preemption)")
Stats.compute(elapsed_values).print("Elapsed time (incl. preemption)")
print()
# ── CLI ───────────────────────────────────────────────────────────────────────
def parse_args() -> argparse.Namespace:
p = argparse.ArgumentParser(
description="SystemView CSV validator: slot-based period checking from TIME_ZERO.",
formatter_class=argparse.RawDescriptionHelpFormatter,
epilog="""
TIME_ZERO marker:
Emit SEGGER_SYSVIEW_Mark(0xFF) at system start.
All timestamps are relative to that marker.
Examples:
List all marker IDs found:
%(prog)s recording.csv --list-markers
Validate Engine (10ms) and Rain (20ms) with 0.5 ms tolerance for period start
%(prog)s recording.csv \\
--marker 0x00 --task Engine --period-ms 10.0 --max-exec-ms 3.0 \\
--marker 0x01 --task Rain --period-ms 20.0 --max-exec-ms 5.0 \\
--tolerance-period-start-ms 0.5
Per-slot detail table:
%(prog)s recording.csv \\
--marker 0x00 --task Engine --period-ms 10.0 --verbose
Export per-interval data:
%(prog)s recording.csv \\
--marker 0x00 --task Engine --period-ms 10.0 --output-csv results.csv
""")
p.add_argument("csv_file")
p.add_argument("--verbose", "-v", action="store_true")
p.add_argument("--list-markers", action="store_true")
p.add_argument("--marker",
type=lambda x: int(x, 0),
action="append", dest="markers", metavar="ID",
help="Marker ID in hex (e.g. 0x00) or decimal")
p.add_argument("--task",
type=str,
action="append", dest="tasks", metavar="NAME")
p.add_argument("--period-ms",
type=float,
action="append", dest="periods", metavar="MS")
p.add_argument("--max-exec-ms",
type=float,
action="append", dest="max_execs", metavar="MS")
p.add_argument("--tolerance-period-start-ms", type=float, default=0)
p.add_argument("--output-csv",
type=str, default=None)
return p.parse_args()
# ── Main ──────────────────────────────────────────────────────────────────────
def main() -> None:
args = parse_args()
if not os.path.isfile(args.csv_file):
print(f"ERROR: File not found: {args.csv_file}", file=sys.stderr)
sys.exit(1)
print(f"File: {args.csv_file}")
print()
tolerance_period_start_us = 500
if args.tolerance_period_start_ms >= 0:
tolerance_period_start_us = args.tolerance_period_start_ms * 1000
# ── Parse ─────────────────────────────────────────────────────────────────
raw_events, warnings = parse_csv(args.csv_file, verbose=args.verbose)
for w in warnings:
print(f"WARNING: {w}")
counts = {k: sum(1 for e in raw_events if e.kind == k)
for k in ('marker_start', 'marker_stop',
'task_run', 'task_stop', 'isr_enter', 'isr_exit')}
print(f"Events : {counts['marker_start']} marker starts "
f"{counts['marker_stop']} marker stops "
f"{counts['task_run']} task run "
f"{counts['task_stop']} task stop "
f"{counts['isr_enter']} ISR enter "
f"{counts['isr_exit']} ISR exit")
# ── Find TIME_ZERO ────────────────────────────────────────────────────────
time_zero_us = find_time_zero(raw_events)
if time_zero_us is None:
print(f"\nERROR: TIME_ZERO marker (0x{TIME_ZERO_MARKER_ID:02X}) "
f"not found in recording.")
print(f" Add SEGGER_SYSVIEW_Mark(0xFF) at system start.")
sys.exit(1)
last_us = max((e.time_us for e in raw_events), default=time_zero_us)
total_us = last_us - time_zero_us
print(f"TIME_ZERO: absolute t={time_zero_us:.3f}us "
f"recording covers {total_us/1000:.3f}ms after TIME_ZERO")
print()
# ── Build windows and intervals ───────────────────────────────────────────
exec_windows = build_exec_windows(raw_events)
isr_windows = build_isr_windows(raw_events)
intervals_by_id = build_marker_intervals(raw_events, exec_windows,
isr_windows, time_zero_us)
if not intervals_by_id:
print("No task marker intervals found.")
print("Check that Start/Stop Marker events (other than 0xFF) "
"are present in the CSV.")
sys.exit(0)
all_ids = sorted(intervals_by_id.keys())
# ── List mode ─────────────────────────────────────────────────────────────
if args.list_markers:
print("Marker IDs found (TIME_ZERO 0xFF excluded):")
print(f" {'ID':>6} {'intervals':>10} task(s)")
print(f" {'──':>6} {'─────────':>10} ──────")
for mid in all_ids:
ivs = intervals_by_id[mid]
tasks = sorted(set(iv.task_name for iv in ivs))
print(f" {mid:#06x} {len(ivs):>10} {', '.join(tasks)}")
return
# ── Build constraints ─────────────────────────────────────────────────────
constraints: Dict[int, MarkerConstraint] = {}
if args.markers:
for i, mid in enumerate(args.markers):
c = MarkerConstraint(marker_id=mid)
if args.tasks and i < len(args.tasks):
c.task_name = args.tasks[i]
if args.periods and i < len(args.periods):
c.period_ms = args.periods[i]
if args.max_execs and i < len(args.max_execs):
c.max_exec_ms = args.max_execs[i]
constraints[mid] = c
target_ids = sorted(constraints.keys()) if constraints else all_ids
overall_pass = True
# ── Analyse ───────────────────────────────────────────────────────────────
for mid in target_ids:
ivs = intervals_by_id.get(mid, [])
passed = analyse_marker(mid, ivs, constraints.get(mid),
total_us, tolerance_period_start_us, verbose=args.verbose)
if not passed:
overall_pass = False
# ── Overall summary ───────────────────────────────────────────────────────
print(f"{'=' * 68}")
print(f"{'PASS' if overall_pass else 'FAIL'} "
f"{'All markers passed' if overall_pass else 'Violation(s) detected'}")
print()
# ── CSV export ────────────────────────────────────────────────────────────
if args.output_csv:
with open(args.output_csv, "w", newline='') as f:
writer = csv.writer(f)
writer.writerow([
"marker_id", "task_name",
"slot_index", "slot_start_ms", "slot_end_ms",
"iv_start_ms", "iv_stop_ms",
"exec_ms", "elapsed_ms",
"preemption_ms", "preemption_pct",
"isr_ms", "other_task_ms",
"slot_result",
])
for mid in sorted(intervals_by_id.keys()):
c = constraints.get(mid)
period_us = c.period_ms * 1000.0 if c and c.period_ms else None
limit_us = (c.max_exec_ms * 1000.0
if c and c.max_exec_ms else 0.0)
ivs = intervals_by_id[mid]
if period_us:
num_slots = max(1, int(total_us / period_us))
slots = assign_slots(ivs, period_us, tolerance_period_start_us, num_slots)
for s in slots:
for iv in s.intervals:
result = 'PASS' if s.passes(limit_us) else 'FAIL'
if s.double_fired and iv is not s.intervals[0]:
result = 'FAIL_DUPE'
writer.writerow([
f"{mid:#04x}", iv.task_name,
s.slot_index,
f"{s.slot_start_us/1000:.6f}",
f"{s.slot_end_us/1000:.6f}",
f"{iv.start_us/1000:.6f}",
f"{iv.stop_us/1000:.6f}",
f"{iv.exec_us/1000:.6f}",
f"{iv.elapsed_us/1000:.6f}",
f"{iv.preemption_us/1000:.6f}",
f"{iv.preemption_pct:.2f}",
f"{iv.isr_us/1000:.6f}",
f"{iv.other_task_us/1000:.6f}",
result,
])
if s.missing:
writer.writerow([
f"{mid:#04x}",
c.task_name if c else '',
s.slot_index,
f"{s.slot_start_us/1000:.6f}",
f"{s.slot_end_us/1000:.6f}",
'', '', '', '', '', '', '', '',
'MISSING',
])
else:
for iv in ivs:
writer.writerow([
f"{mid:#04x}", iv.task_name,
'', '', '',
f"{iv.start_us/1000:.6f}",
f"{iv.stop_us/1000:.6f}",
f"{iv.exec_us/1000:.6f}",
f"{iv.elapsed_us/1000:.6f}",
f"{iv.preemption_us/1000:.6f}",
f"{iv.preemption_pct:.2f}",
f"{iv.isr_us/1000:.6f}",
f"{iv.other_task_us/1000:.6f}",
'',
])
print(f"Per-interval data exported to {args.output_csv}")
sys.exit(0 if overall_pass else 1)
if __name__ == "__main__":
main()
Solution
The reason is simple. In the previous codelab, task scheduling occurred without preemption.
With the new set of tasks, however, preemption occurs: the Rain task is preempted by the Engine and the Tire tasks.
This can be seen in the output when running a statistical computation with the new script:
====================================================================
Marker 3 (0x00000003)
Task : Rain
────────────────────────────────────────────────────────────────────
Period (start → start, wall clock):
n=18 mean=249.389648ms min=239.044190ms max=260.101318ms std=7.174595ms
Execution time (Rain running, excl. preemption):
n=19 mean=25.159334ms min=25.146484ms max=25.177003ms std=0.015067ms
Elapsed time (Rain wall clock, incl. preemption):
n=19 mean=37.385639ms min=35.247802ms max=45.379639ms std=4.120230ms
Preemption (elapsed - execution for Rain):
n=19 mean=12.226305ms min=10.101318ms max=20.202637ms std=4.115025ms
ISR time (within marker interval):
n=19 mean=0.030518ms min=0.030517ms max=0.030518ms std=0.000000ms
ISR 37: n=19 mean=0.030518ms max=0.030518ms
Other tasks (preempted Rain within interval):
n=19 mean=12.223093ms min=10.070800ms max=20.202637ms std=4.116694ms
Engine: n=19 mean=10.098106ms max=10.101318ms
Tire: n=4 mean=10.093690ms max=10.101319ms
Preemption % : mean=32.0% max=44.5%
Add Aperiodic Tasks
In a real system, aperiodic requests would be generated by various actors. For example, a user could press a button, or an alarm could be triggered by a sensor. These requests would arrive at unpredictable times.
In this codelab and in the project, we distinguish between sporadic and background tasks. Background tasks are generated by user actions, while sporadic tasks arrive at predictable times. This approach is not realistic, but it allows us to obtain reproducible and measurable results without limiting scheduling implementation to predictable times.
Add Sporadic Tasks
Add a Generator of Sporadic Tasks
To generate sporadic tasks at predefined times, we use the aperiodic event generator given below:
src/sporadic_task_generator.hpp
// Copyright 2025 Haute école d'ingénierie et d'architecture de Fribourg
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
/****************************************************************************
* @file task_recorder.hpp
* @author Serge Ayer <serge.ayer@hefr.ch>
*
* @brief SporadicTaskGenerator class declaration
*
* @date 2025-07-01
* @version 1.0.0
***************************************************************************/
#pragma once
#if CONFIG_APERIODIC_TASKS
// stl
#include <atomic>
// zpp_lib
#include "zpp_include/barrier.hpp"
#include "zpp_include/message_queue.hpp"
#include "zpp_include/non_copyable.hpp"
#include "zpp_include/zephyr_result.hpp"
namespace car_system {
class SporadicTaskGenerator : private zpp_lib::NonCopyable<SporadicTaskGenerator> {
public:
// constructor
#if CONFIG_USERSPACE
SporadicTaskGenerator();
#else // CONFIG_USERSPACE
SporadicTaskGenerator() = default;
#endif // CONFIG_USERSPACE
// destructor
~SporadicTaskGenerator() = default;
// method called from CarSystem::start() for starting generation of sporadic events
void start(zpp_lib::Barrier& barrier);
// method called for stopping the generator
void stop();
// method called to obtain a task, if existing. If a sporadic task exists, then
// the method returns true with the computing time of the sporadic task initialized.
// If no sporadic task exists, then the method returns false. In case of error, the
// error is returned using ZephyrBoolResult.
zpp_lib::ZephyrBoolResult get_sporadic_task(std::chrono::milliseconds& taskComputationTime, const std::chrono::milliseconds& timeOut);
// method called to resubmit a task that could not be executed
zpp_lib::ZephyrBoolResult resubmit_sporadic_task(const std::chrono::milliseconds& taskComputationTime);
#if CONFIG_USERSPACE
void grant_access(k_tid_t tid);
#endif // CONFIG_USERSPACE
// constant to instantiate the templated zpp_lib::MessageQueue attribute
static constexpr uint8_t MESSAGE_QUEUE_SIZE = 10;
private:
// stop flag, used for stopping each task (set in stop())
volatile std::atomic<bool> _stopFlag = false;
zpp_lib::MessageQueue<std::chrono::milliseconds, MESSAGE_QUEUE_SIZE> _messageQueue;
};
} // namespace car_system
#endif // CONFIG_APERIODIC_TASKS
src/sporadic_task_generator.cpp
// Copyright 2025 Haute école d'ingénierie et d'architecture de Fribourg
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
/****************************************************************************
* @file car_system.cpp
* @author Serge Ayer <serge.ayer@hefr.ch>
*
* @brief SporadicClassGenerator implementation
*
* @date 2025-07-01
* @version 1.0.0
***************************************************************************/
#if CONFIG_APERIODIC_TASKS
#include "sporadic_task_generator.hpp"
// zephyr
#include <zephyr/logging/log.h>
#if CONFIG_USERSPACE
#include <zephyr/app_memory/app_memdomain.h>
#endif // CONFIG_USERSPACE
#if CONFIG_SEGGER_SYSTEMVIEW
#include "SEGGER_SYSVIEW.h"
#endif // CONFIG_SEGGER_SYSTEMVIEW
#if CONFIG_USERSPACE
extern struct k_mem_partition app_partition;
#define APP_DATA K_APP_DMEM(app_partition) // MISRA-suppress: 19.0.2 Zephyr partition-tagging macro
#endif // CONFIG_USERSPACE
// stl
#include <chrono>
// local
#if CONFIG_TEST
#include "task_recorder.hpp"
#endif
LOG_MODULE_DECLARE(car_system, CONFIG_APP_LOG_LEVEL);
namespace car_system {
#if CONFIG_USERSPACE
APP_DATA char gMsgqBuffer[sizeof(std::chrono::milliseconds) * SporadicTaskGenerator::MESSAGE_QUEUE_SIZE] = {0};
SporadicTaskGenerator::SporadicTaskGenerator() : _messageQueue(gMsgqBuffer) {}
#endif // CONFIG_USERSSPACE
void SporadicTaskGenerator::start(zpp_lib::Barrier& barrier) {
// Wait that all threads are ready to start
std::chrono::milliseconds startExecutionTime =
#if CONFIG_TEST
std::chrono::duration_cast<std::chrono::milliseconds>(barrier.wait(&TaskRecorder::set_zero_time));
#else
std::chrono::duration_cast<std::chrono::milliseconds>(barrier.wait());
#endif
LOG_DBG("SporadicTaskGenerator Thread starting at time %lld ms", startExecutionTime.count());
using std::literals::chrono_literals::operator""ms;
using std::literals::chrono_literals::operator""s;
static const std::chrono::milliseconds SporadicComputingTimes[] = {50ms, 50ms, 50ms, 50ms};
static const std::chrono::milliseconds SporadicArrivalTimes[] = {60ms, 300ms, 630ms, 900ms};
static const uint32_t NbrOfSporadicRequestsPerMajorCycle = sizeof(SporadicArrivalTimes) / sizeof(SporadicArrivalTimes[0]);
uint32_t cycleIndex = 0;
static constexpr auto majorCycleDuration = 1000ms;
while (!_stopFlag) {
uint32_t sporadicIndexInMajorCycle = 0;
// generate aperiodic requests for this major cycle
while (sporadicIndexInMajorCycle < NbrOfSporadicRequestsPerMajorCycle) {
// wait for the next request to be generated
auto nextTime = SporadicArrivalTimes[sporadicIndexInMajorCycle] + startExecutionTime + (cycleIndex * majorCycleDuration);
LOG_DBG("SporadicTaskGenerator thread sleeping until %lld ms", nextTime.count());
zpp_lib::ThisThread::sleep_until(nextTime);
static constexpr auto timeOut = 1s;
zpp_lib::ZephyrBoolResult boolRes = _messageQueue.try_put_for(timeOut, SporadicComputingTimes[sporadicIndexInMajorCycle]);
__ASSERT(!boolRes.has_error(), "Got an error from try_put_for: %d", static_cast<int>(boolRes.error()));
if (!boolRes) {
LOG_ERR("Could not put event to messageQueue");
}
sporadicIndexInMajorCycle++;
}
// move to next major cycle
cycleIndex++;
}
}
void SporadicTaskGenerator::stop() { _stopFlag = true; }
zpp_lib::ZephyrBoolResult SporadicTaskGenerator::get_sporadic_task(std::chrono::milliseconds& taskComputationTime,
const std::chrono::milliseconds& timeOut) {
zpp_lib::ZephyrBoolResult boolRes = _messageQueue.try_get_for(timeOut, taskComputationTime);
__ASSERT(!boolRes.has_error(), "Got an error from try_put_for: %d", static_cast<int>(boolRes.error()));
return boolRes;
}
zpp_lib::ZephyrBoolResult SporadicTaskGenerator::resubmit_sporadic_task(const std::chrono::milliseconds& taskComputationTime) {
using std::literals::chrono_literals::operator""s;
static constexpr auto timeOut = 1s;
zpp_lib::ZephyrBoolResult boolRes = _messageQueue.try_put_for(timeOut, taskComputationTime);
__ASSERT(!boolRes.has_error(), "Got an error from try_put_for: %d", static_cast<int>(boolRes.error()));
if (!boolRes) {
LOG_ERR("Could not put event to messageQueue");
}
return boolRes;
}
#if CONFIG_USERSPACE
void SporadicTaskGenerator::grant_access(k_tid_t tid) { _messageQueue.grant_access(tid); }
#endif // CONFIG_USERSPACE
} // namespace car_system
#endif // CONFIG_APERIODIC_TASKS
The arrival and computation times correspond to the ones documented in the project specification for the presence detection task.
To guarantee that events are generated on time, this generator must be started
in a separate thread with the highest possible priority. This thread must be
declared as an attribute of the CarSystem class and it must be started in the
CarSystem::start() method.
Serve Sporadic Tasks using a Deferrable Server
To serve sporadic tasks without breaking the schedule of periodic tasks, we use a deferrable server.
Dimension the Deferrable Server
To implement a deferrable server, you first need to dimension it, as described in the related exercise.
Implement the Deferrable Server
Once the \(T_{S}\) and \(C_{S}\) values of the server are known, integrate the following class declaration for a deferrable server implementation into your application:
src/deferrable_server.hpp
// Copyright 2025 Haute école d'ingénierie et d'architecture de Fribourg
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
/****************************************************************************
* @file task_recorder.hpp
* @author Serge Ayer <serge.ayer@hefr.ch>
*
* @brief DeferrableServer class declaration
*
* @date 2025-07-01
* @version 1.0.0
***************************************************************************/
#pragma once
#if CONFIG_APERIODIC_TASKS
// stl
#include <atomic>
// zpp_lib
#include "zpp_include/barrier.hpp"
#include "zpp_include/non_copyable.hpp"
#include "zpp_include/zephyr_result.hpp"
// local
#include "periodic_task_info.hpp"
#include "sporadic_task_generator.hpp"
namespace car_system {
class DeferrableServer : private zpp_lib::NonCopyable<DeferrableServer> {
public:
// method called from CarSystem::start() for starting generation of sporadic events
void start(zpp_lib::Barrier& barrier, const PeriodicTaskInfo& taskInfo, SporadicTaskGenerator& taskGenerator);
// method called for stopping the generator
void stop();
private:
// stop flag, used for stopping each task (set in stop())
std::atomic<bool> _stopFlag = false;
};
} // namespace car_system
#endif // CONFIG_APERIODIC_TASKS
Implement this class, as follows:
- In the
start()method, an infinite loop is implemented. The loop exits only when the attribute_stopFlagis set in thestop()method. - The server budget must be replenished at the beginning of each period. This means that the wait time for sporadic tasks cannot exceed the end of the server task period. This also requires an implementation with two embedded loops and replenishment in the outer loop.
- In the inner loop, the server must wait continuously for sporadic tasks. When a task is available, the server must execute it within the allocated server budget. If the available budget is insufficient, the task must be resubmitted to the sporadic task generator.
Implementation limitations
To keep things simple, you should apply the following limitations when implementing and integrating the deferrable server:
- Choose a \(C_S\) value larger than the computation time of all sporadic tasks. In our scenario, this means that \(C_S >= 50\ ms\).
- The deferrable server must execute a sporadic task only if the remaining budget is sufficient for executing the entire task. Executing only part of a sporadic task would require the server task to suspend itself and implement cooperative scheduling, which is beyond the scope of this project.
Integrating sporadic tasks in the CarSystem class requires adding a
DeferrableServer attribute and a dedicated thread in the CarSystem class. If
you correctly implement the generator and the server, you should observe task
scheduling identical to that modeled by adding the deferrable server task with
the sporadic tasks generated at the predefined times.
After implementing the deferrable server, you should notice that the period and computing time
of the Deferrable Server task correspond to the \(T_{S}\) and \(C_{S}\) calculated when dimensioning the
deferrable server. These values can be computed using the csv_marker_parser_improved.py script.
Implement Background Scheduling of Aperiodic Tasks
With background scheduling, aperiodic tasks are scheduled in the background. Whenever no other task is ready to execute, one aperiodic task is selected from the queue of aperiodic tasks and is run. This can be implemented using the queue of aperiodic tasks as illustrated below:
In this codelab and in the project, aperiodic tasks are created by pressing on a button and they are server using a work queue mechanism. This can be implemented as follows:
- Create a
zpp_lib::WorkQueueinstance in theCarSystemclass. This instance should run using an internal thread with the lowest possible priority. - Create a
zpp_lib::Workinstance in theCarSystemclass. - Use the
zpp_lib::InterruptInclass and register a callback on button press with thezpp_lib::InterruptIn::on_fall()method. - The callback method must submit the background task to the
zpp_lib::WorkQueueinstance by using thezpp_work::Workinstance.
If you implement Background Scheduling correctly, you should notice that the computing time of the background task corresponds as expected to \(200 ms\):
Marker 5 (0x00000005)
Task : BackgroundWQ
────────────────────────────────────────────────────────────────────
Period (start → start, wall clock):
n=3 mean=1864.969889ms min=200.500489ms max=3074.127197ms std=1216.529063ms
Execution time (BackgroundWQ running, excl. preemption):
n=4 mean=200.622559ms min=200.439453ms max=200.836182ms std=0.160036ms
Wrap-Up
By the end of this codelab, you should have completed the following steps:
- You implemented the set of periodic tasks as defined in the project specification.
- You dimensioned a deferrable server given this set of periodic tasks.
- You implemented and added a deferrable server to the
CarSystemclass for serving sporadic tasks. - You integrated a sporadic task generator into the
CarSystemclass. - You statistically validated that the task periods and computation times of the deferrable server are as expected.
- You implemented and added a background scheduling mechanism for serving aperiodic tasks.
- You implemented a mechanism for generating aperiodic tasks by pressing a button.